Proyectos
-
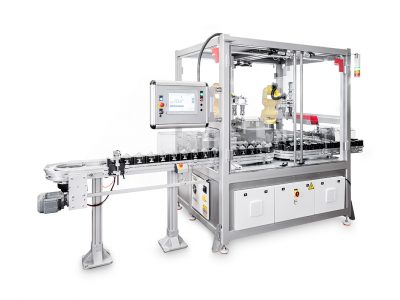
Estación robotizada de marcaje de láser
Estación robotizada de marcaje de texto legal en la base de los frascos de vidrio mediante láser. Cadencia: 40 unidades/min
-

Línea automática de montaje de tapones a frascos
Línea compuesta por almacén automático de bandejas de tapones para su posterior montaje en frascos mediante robots o manipuladores. Cadencia: 45 unidades/min
-

Línea automática de montaje y verificación de frasco en su packaging
Línea de montaje de conjunto final de packaging formado por frasco, su correspondiente base y lata metálica. Alta flexibilidad que permite el montaje de todas las referencias de tamaño y la verificación del correcto posicionado y presencia de componentes. Cadencia: 20-50 unidades/min (según modelo)
-

Máquina rotativa de ensamblaje y control
Equipo compuesto por un plato rotativo de 8 estaciones confinado para sala blanca. La solución incluye aplicaciones como: alimentación por vibración, clipados de componentes, ensamblaje, control funcional del producto finalizado y extracción automática. Cadencia: 50 piezas/min.
-

Estación robotizada carga a línea de montaje
Estación robotizada de carga sobre línea de montaje. Estación robotizada compuesta por flexpicker o similar para carga y descarga de componentes (alta velocidad). Equipo adaptado a sala blanca.
-

Estación robotizada carga a línea de Flowpack
Estación robotizada de carga sobre línea de Flowpack. Estación robotizada para la carga automática de producto sobre el alimentador de cangilones de Flowpack. Recogida del producto mediante robot Scara. Pinza del robot multi-referencia adaptada a cada versión. Cadencia: Variable entre 60 a 100 piezas/min (según referencia).
-
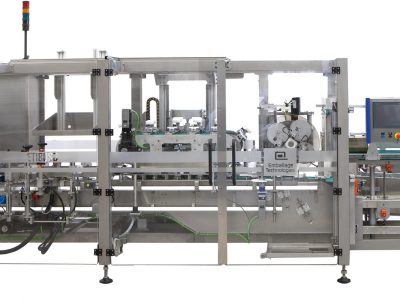
Estuchadora con carga horizontal automática
Equipo totalmente flexible de alta velocidad. Sistema de pegado mediante adhesivo de fusión en caliente con cambio automático Dimensiones del estuche: – Longitud: 75 a 320 mm – Ancho: 30-180 mm – Altura: 16 a 100 mm Cadencia: Hasta 220 estuches/minuto
-

Estación robotizada
Estación robotizada compuesta por un robot delta para carga y descarga de componentes (alta flexibilidad). Esta solución incluye aplicaciones como: soldadura por ultrasonidos, inspección a través de la generación del 3D mediante láser. Cadencia: 1500 piezas/hora.
-

Estación robotizada carga a flowpack
Línea que lleva incorporado un robot para carga y descarga de productos (alta flexibilidad) a Flowpack para su posterior distribución y carga a multipack. Pinza extensible adaptada a paso de Flowpack. Cadencia: 280 paquetes/min.
-

Estación de marcaje láser
Estación de marcado láser lateral para frascos de cristal en línea FMS. Detección de presencia de restos de alcohol en los frascos con zona de extracción de vapores. Cadencia: 30 piezas/min.
-

Paletizado automático
Estación robotizada para el paletizado automático de diferentes modelos de cajas. Cadencia: variable en función del tamaño de caja.
-

Máquina de troquelado para parachoques
Permite troquelar tanto los alojamientos para sensores de aparcamiento, cómo cámara trasera, tobera, placa matricula y el correspondiente adhesivado o soldadura por ultrasonidos del soporte de sensores de aparcamiento. Operación de carga y descarga manual. Troquel accionado tanto por servos controlados, como neumáticos o hidráulicos. Cadencia: 1 pieza/min.
